
Imprimante I3D Ref. A-086250
- Garantie 3 ans
-
 Support pédagogique inclus !
Support pédagogique inclus !
-
 Made in France
Made in France
-
 « CE »
« CE »
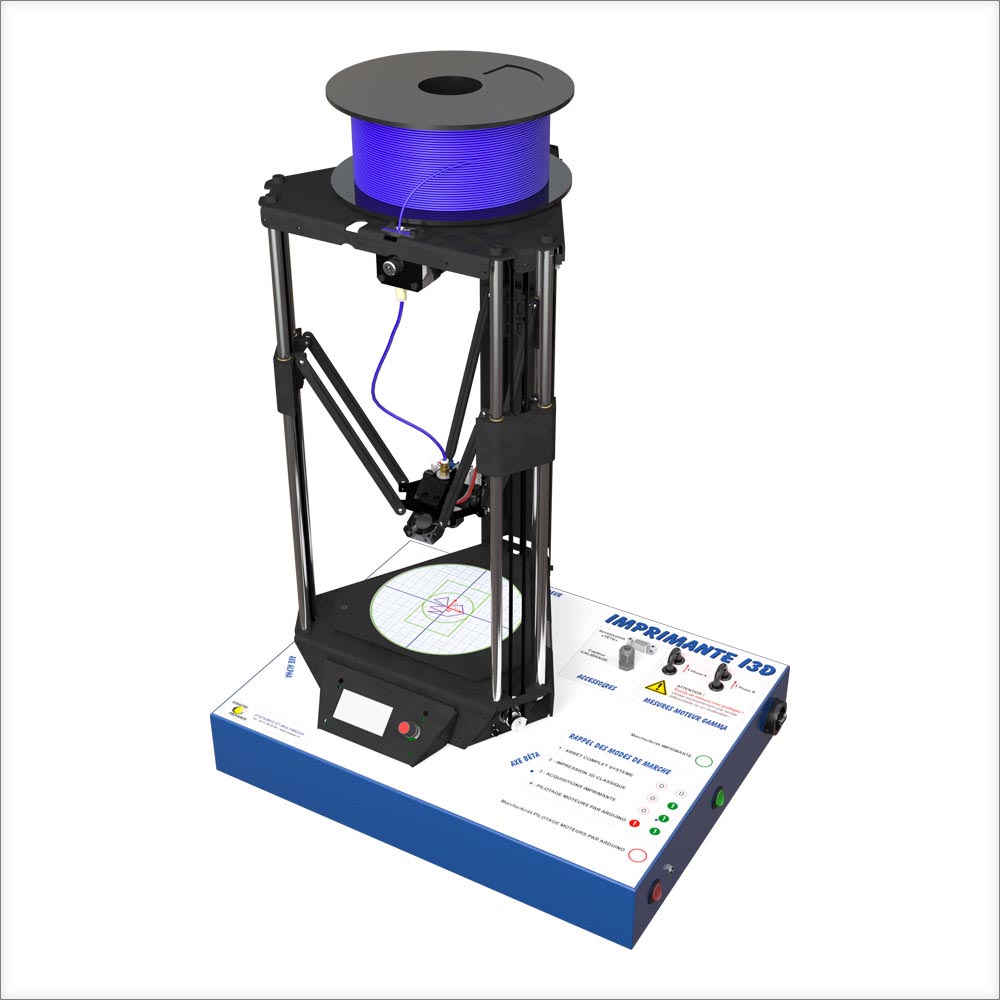
Cette solution didactisée représente une imprimante 3D réelle et fonctionnelle. La tête d’impression, la motorisation ont été instrumentées de manière à s’approprier et valider les solutions constructives et lois de commandes propres aux structures DELTA. Totalement intégrée sur son pupitre d'acquisition en acier, l'ensemble est rapidement mis en oeuvre avec une simple liaison USB vers le PC équipé de son interface de Pilotage, mesures et acquisition. Une nacelle de capteurs à installer sur la tête d'impression permet de réaliser de nombreuses acquisitions.
Descriptif technique
- 1 Imprimante « I3D » fonctionnelle;
- 1 Bobine de fil PLA pour impression de pièces 3D ;
- 1 Nacelle de capteurs à installer sur la tête d'impression (Accéléromètre 3 axes, Laser, Mini caméra HD).
- 1 Plateau sérigraphié (validation trajectoires par laser et suivi caméra) ;
- 1 Alimentation secteur ;
- 1 Câble de liaison USB ;
- 1 Logiciel d'Interface de Pilotage et Acquisition sur PC (liaison USB)
Équipement
Le dossier pédagogique contenant :
- Dossier Technique ;
- EMP (Environnement Multimédia Pédagogique sur Cd-rom) ;
- Manuel d'utilisation EMP ;
- Manuel Interface de Pilotage et Acquisitions ;
- Travaux Pratiques.
- Volume d'impression : 150mm pour 200mm de hauteur,
- Vitesse d'impression nominale : >80mm/s,
- Axe linéaire à courroie et coulisseau instrumenté par codeur sur moteur pas à pas type NEMA 17,
- Nacelle et tête d'impression instrumentée par une série de capteurs (accéléromètre 3 axes, mini-caméra...) pointeur laser,
- Pupitre connecté par liaison USB. 3 modes de marche,
- Impression d'une pièce 3D,
- Acquisitions et mesures sur PC,
- Prise en main du pilotage des axes linéaires par contrôleur ARDUINO,
- Dispositif de mesures à shunt :
- Courant moteur "GAMMA" phase A,
- Courant moteur "GAMMA" phase B.
Objectifs pédagogiques
ACTIVITES PEDAGOGIQUES EN S-SI :
Innover :
- Représenter une solution pour une utilisation pick and place de la structure delta ;
- Matérialiser la solution à l’aide de l’imprimante 3D.
Analyser :
- Analyser et différencier le système industriel et le système fourni par Didastel composé du système industriel
- Analyser l’architecture de la chaîne d’information du système Didastel : identifier les composants réalisant les fonctions acquérir, traiter, communiquer, distribuer, convertir transmettre ;
- Analyser la chaine d’information et d’énergie du système – identifier la structure asservie ;
- Analyser les performances de l’axe asservi en température : réponses temporelles ;
- Analyser le comportement d’un objet à l’aide d’un diagramme état transition ;
- Analyser les résultats d’expérimentation vis-à-vis des critères de performance ;
- Quantifier les écarts à l’aide d’un tableur / Python pour traiter les données.
Modéliser :
- Traduire le comportement attendu par un diagramme état transition ;
- Traduire un algorithme en un programme exécutable ;
- Modéliser un mécanisme sous la forme d’un graphe des liaisons et schéma cinématique ;
- Modéliser les mouvements ;
- Déterminer la loi entrée sortie géométrique ;
- Associer un modèle à un système asservi.
Expérimenter et Simuler
- Instrumenter tout ou une partie d’un produit en vue de mesurer les performances à l’aide d’une carte microcontrôleur ;
- Modifier les paramètres influents et le programme de commande en vue d’optimiser les performances du produit ;
- Valider un modèle numérique de l’objet simulé.
Communiquer
- Rendre compte des résultats sous la forme d’un tableau ou graphique ;
- Documenter un programme informatique.
ACTIVITES PEDAGOGIQUES CPGE :
Analyser
- Analyser et différencier le système industriel et le système fourni par Didastel composé du système industriel
- Analyser l’architecture de la chaîne d’information du système Didastel : identifier les composants réalisant les fonctions acquérir, traiter, communiquer, distribuer, convertir transmettre ;
- Analyser la chaine d’information et d’énergie du système – identifier la structure asservie ;
- Analyser les performances de l’axe asservi en température : réponses temporelles ;
- Analyser la structure de commande sous la forme d’un graphe d’état.
Modéliser
- Proposer un modèle de connaissance et de comportement (binaire naturel, opérateur logique fondamentaux, chronogramme) ;
- Proposer un modèle de connaissance et de comportement (proposer une modélisation des liaisons) ;
- Proposer un modèle de connaissance et de comportement sous la forme d’un SLCI en modélisation causale. (Analyser ou établir le schéma bloc d’un système. Déterminer les fonctions de transfert) ;
- Procéder à la mise en œuvre d’une démarche de résolution analytique (loi entrée sortie géométrique) ;
- Procéder à la mise en œuvre d’une démarche de résolution numérique (choisir les paramètres de simulation)
- Procéder à la mise en œuvre d’une démarche de résolution analytique (Déterminer la réponse temporelle d’un ordre 1 et d’un ordre 2. Prévoir les performances de rapidité) ;
- Compléter des chronogrammes ;
- Prédire le comportement à partir de la lecture du graphe d’état ;
- Ecrire les fonctions sous python de la cinématique inverse su robot ;
- Tracer sur la même courbe les résultats des modèles et la réponse mesurée et analyser les écarts ;
- Réaliser la modélisation plane ;
- Ecrire la fermeture géométrique de cette modélisation simplifiée afin d’en obtenir la loi entrée sortie ;
- Prendre en main et régler les paramètres d’une modélisation acausale de la cinématique d’un mouvement plan ;
- Simuler le modèle inverse avec Solidworks ;
- Rajouter une saturation afin de minimiser des écarts ;
- Simuler le comportement d’un graphe d’état dans matlab ;
- Simulation de loi entrée sortie avec Python.
Expérimenter
- Identifier et connecter les entrées – sorties ;
- Modifier et Créer le graphe d’état simple ;
- Régler la communication entre le système et l’ordinateur ;
- Piloter un mouvement de translation ;
- Exporter la mesure dans un tableur ;
- Identification d’un modèle d’ordre 1 et d’un modèle d’ordre 2 periodique ;
- Identifier la caractéristique d’un capteur ;
- Identification de l’interface de puissance ;
- Générer un programme et l’implanter dans le système cible ;
- Comparer les mesures accessibles aux courbes simulées.
Concevoir
- Proposer les réglages des paramètres de correcteurs pour satisfaire le cahier des charges.
Communiquer
- Exploiter des documents techniques dans une démarche de modélisation et de validation expérimentale ;
- Décrire les chaines fonctionnelles selon les formalismes de communication au programme.